Focus on Sinkhorn#
We provide in this example a detailed walk-through some of the functionalities of the Sinkhorn algorithm, including the computation of sinkhorn_divergence().
import sys
if "google.colab" in sys.modules:
!pip install -q git+https://github.com/ott-jax/ott@main
import functools
import time
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
import ott
from ott import problems
from ott.geometry import geometry, pointcloud
from ott.solvers import linear
from ott.solvers.linear import acceleration, sinkhorn
from ott.tools.sinkhorn_divergence import sinkhorn_divergence
From texts to word histograms#
We adapt a keras NLP tutorial to preprocess raw text (here a subset of texts from the newsgroup20 database) and turn them into word embeddings histograms; see here for detailed preprocessing.
This helps us recover 635 histograms supported on 4000 words, each represented by a 50-dimensional vector. We download that data using an url
import io
import requests
import numpy as np
response = requests.get("https://marcocuturi.net/embeddings.npz")
data = np.load(io.BytesIO(response.content))
X, HIST = data.get("X"), data.get("HIST")
# X contains 4000 word embeddings in dimension 50 , HIST a 653 x 4000 (row-normalized) matrix of histograms.
print(
f"{HIST.shape[0]} texts supported on up to {HIST.shape[1]} words of dimension {X.shape[1]}"
)
653 texts supported on up to 4000 words of dimension 50
Pairwise Sinkhorn divergences#
Before setting a value for epsilon, let’s get a feel of what the PointCloud of embeddings looks like in terms of distances.
geom = pointcloud.PointCloud(X)
print(
"median cost:",
geom.median_cost_matrix,
" mean cost:",
geom.mean_cost_matrix,
)
median cost: 0.4035166 mean cost: 0.41272438
We can also store this \(4000 \times 4000\) cost matrix, once and for all, because its size is still reasonable.
cost = geom.cost_matrix
print(" max:", jnp.max(geom.cost_matrix))
max: 1.4388261
When setting epsilon to None, the algorithms will default to \(0.05\) of the mean cost described in the geometry. This is no magical number, but rather a simple statistic of the scale of the problem. We recommend that you tune epsilon by yourself, but using None might avoid common issues (such as running Sinkhorn with a very small epsilon while the cost matrices are large).
print("Default epsilon is: ", geom.epsilon)
Default epsilon is: 0.02063622
Based on this, we simply set epsilon to 1e-2
epsilon = 1e-2
We can now make a simple test run, and compute a regularized optimal transport cost between a few histograms.
As we see below, the number of iterations to solve such problems, for that level of epsilon, ranges anywhere from 1 to 2 digits.
n_iters = []
for i in range(13):
n_iters.append(
linear.solve(
geometry.Geometry(cost_matrix=cost, epsilon=epsilon),
lse_mode=False,
a=HIST[0, :],
b=HIST[1 + i, :],
).n_iters
)
print(np.array(n_iters))
[290 60 70 90 120 100 120 120 80 70 80 110 100]
We now define a jitted and parallel version of the Sinkhorn() solver. We first define a convenience wrapper that computes the regularized OT cost of a problem defined by histograms a, b, a cost and epsilon regularization. For reasons that will become obvious later, we also provide explicitly a minimum and maximum number of iterations for the Sinkhorn algorithm.
def sink(a, b, cost, epsilon, min_iterations, max_iterations):
return linear.solve(
geometry.Geometry(cost_matrix=cost, epsilon=epsilon),
a=a,
b=b,
lse_mode=False,
min_iterations=min_iterations,
max_iterations=max_iterations,
).reg_ot_cost
We can now use a double vmap(), to compute in one go the pairwise matrix of regularized OT costs between two sets of histograms. The 0 placed in the first arguments of these vmap refer to the batch dimensions. Note how the out_axis of the first and second call differ, to recover respectively a matrix of the same size as the batches we will use.
Jitting is super important to achieve efficiency, don’t forget to wrap whatever you do with a jit().
sink_div_2vmap = jax.jit(
jax.vmap(jax.vmap(sink, [0] + [None] * 5, 0), [None, 0] + [None] * 4, 1),
static_argnums=[4, 5],
)
Compute now a pairwise \(44 \times 37\) matrix of Sinkhorn divergences (about 1000 divergences in total). We pick 30 different texts twice.
HIST_a = jnp.array(HIST[0:45])
HIST_b = jnp.array(HIST[-37:])
print(HIST_a.shape, HIST_b.shape, cost.shape)
(45, 4000) (37, 4000) (4000, 4000)
Dry run with large epsilon value to force jit() compilation before computing timings. This only makes sense within this tutorial.
DIV = sink_div_2vmap(HIST_a, HIST_b, cost, 1, 0, 100)
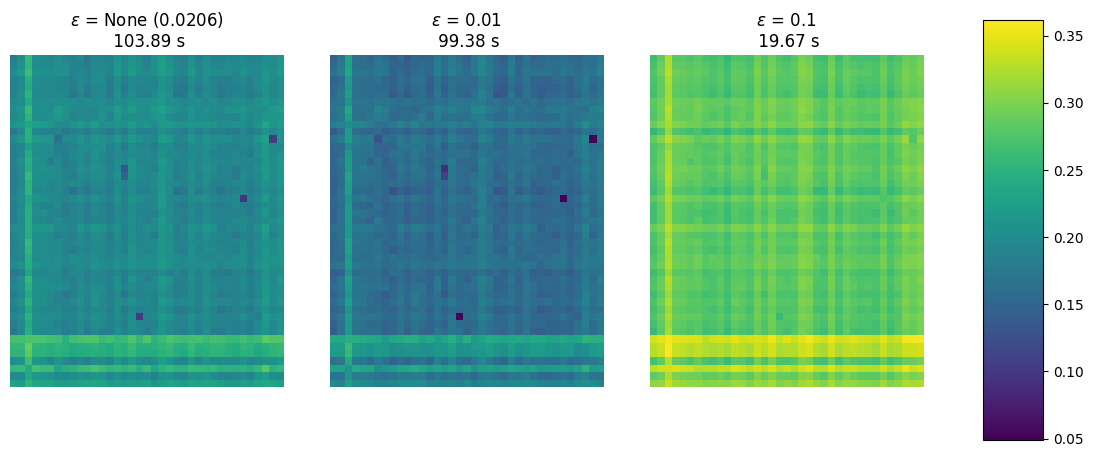
We now carry out divergence computations and plot their matrix for various epsilon.
DIV, ran_in = [], []
epsilons = [None, 1e-2, 1e-1]
for epsilon in epsilons:
tic = time.perf_counter()
DIV.append(
sink_div_2vmap(
HIST_a, HIST_b, cost, epsilon, 0, 100
).block_until_ready()
)
toc = time.perf_counter()
ran_in.append(toc - tic)
Notice how smaller epsilon has a huge impact on time (far longer). Larger epsilon values result in less spiked values with, however, a similar relative pattern.
fig, axes = plt.subplots(1, 3, figsize=(12, 6))
fig.tight_layout()
axes = [axes[0], axes[1], axes[2]]
vmin = min([jnp.min(div) for div in DIV])
vmax = max([jnp.max(div) for div in DIV])
for epsilon, DIV_, ran_in_, ax_ in zip(epsilons, DIV, ran_in, axes):
im = ax_.imshow(DIV_, vmin=vmin, vmax=vmax)
eps = f" ({geom.epsilon:.4f})" if epsilon is None else ""
ax_.set_title(
r"$\varepsilon$ = " + str(epsilon) + eps + f"\n {ran_in_:.2f} s"
)
ax_.axis("off")
fig.subplots_adjust(right=0.8)
cbar_ax = fig.add_axes([0.85, 0.15, 0.05, 0.7])
fig.colorbar(im, cax=cbar_ax)
plt.show()
While the double vmap above resulted in parallel executions, these runs use different termination criteria, which messes up with effective compilation. This can be extremely detrimental to performance.
If you are aiming for speed when computing multiple distances in parallel, it is crucial to set the same number of iterations for each of them to help the XLA compiler.
In the first run below, the compiler cannot manager to parallelize efficiently these runs that differ in number of iterations:
epsilon = 1e-2
# Naive Vmapping
%time out_1 = DIV = sink_div_2vmap(HIST_a, HIST_b, cost, epsilon, 0, 100).block_until_ready()
CPU times: user 1min 37s, sys: 43.9 ms, total: 1min 37s
Wall time: 1min 37s
Here the compiler recognizes instantly that the Sinkhorn iterations can be run efficiently in parallel, as advocated originally in [Cuturi, 2013]. This yields a 50x times speedup!!
# Vmapping while forcing the number of iterations to be fixed.
%time out_2 = DIV = sink_div_2vmap(HIST_a, HIST_b, cost, epsilon, 100, 100).block_until_ready()
CPU times: user 2.5 s, sys: 140 ms, total: 2.63 s
Wall time: 2.03 s
Because the number of iterations was chosen conservatively, we obtain exactly the same results.
jnp.linalg.norm(out_1 - out_2)
Array(1.42627105e-05, dtype=float32)
The impact of \(\varepsilon\) on convergence#
We study in more detail how epsilon impacts the convergence of the algorithm. We define first a my_sinkhorn function to handle computations of Sinkhorn with suitable parameters for this notebook.
def my_sinkhorn(
geom: geometry.Geometry, a: jnp.ndarray, b: jnp.ndarray, **kwargs
):
return linear.solve(
geom, a, b, inner_iterations=1, max_iterations=10_000, **kwargs
)
We select now two text histograms. We will aim for texts that are supported on more than 1000 words each.
ind = jnp.argsort(jnp.sum(jnp.array(HIST) > 0, axis=1))
a, b = HIST[ind[-2]], HIST[ind[-1]]
print(
f"Histogram `a` supported on {jnp.sum(a >0)} words, `b` on {jnp.sum(b >0)} words"
)
Histogram `a` supported on 1121 words, `b` on 1162 words
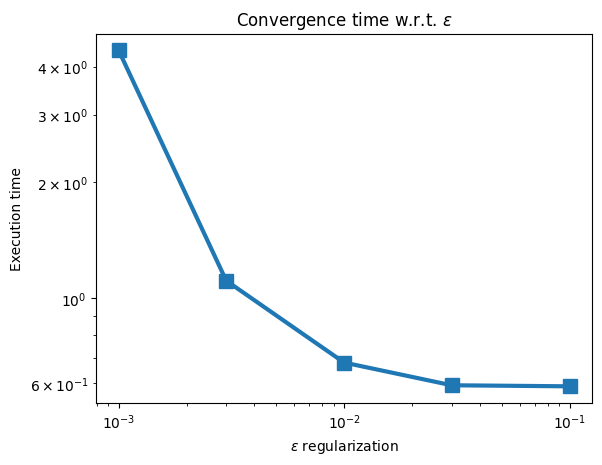
We start by looking more closely into the time needed for Sinkhorn to converge for various epsilon values.
out_eps, leg_eps = [], []
epsilons = [1e-3, 0.3 * 1e-2, 1e-2, 0.3 * 1e-1, 1e-1]
ran_in = np.zeros((len(epsilons),))
for i, epsilon in enumerate(epsilons):
tic = time.perf_counter()
out_eps.append(my_sinkhorn(geometry.Geometry(cost, epsilon=epsilon), a, b))
toc = time.perf_counter()
ran_in[i] = toc - tic
leg_eps.append(
r"$\varepsilon$"
+ f"= {epsilon}, reg_ot_cost = {out_eps[-1].reg_ot_cost:.2f}"
)
These execution times can then be plotted, to result in the following graph:
plt.plot(epsilons, ran_in, marker="s", markersize=10, linewidth=3)
plt.title(r"Convergence time w.r.t. $\varepsilon$")
plt.xscale("log")
plt.yscale("log")
plt.xlabel(r"$\varepsilon$ regularization")
plt.ylabel("Execution time")
plt.show()
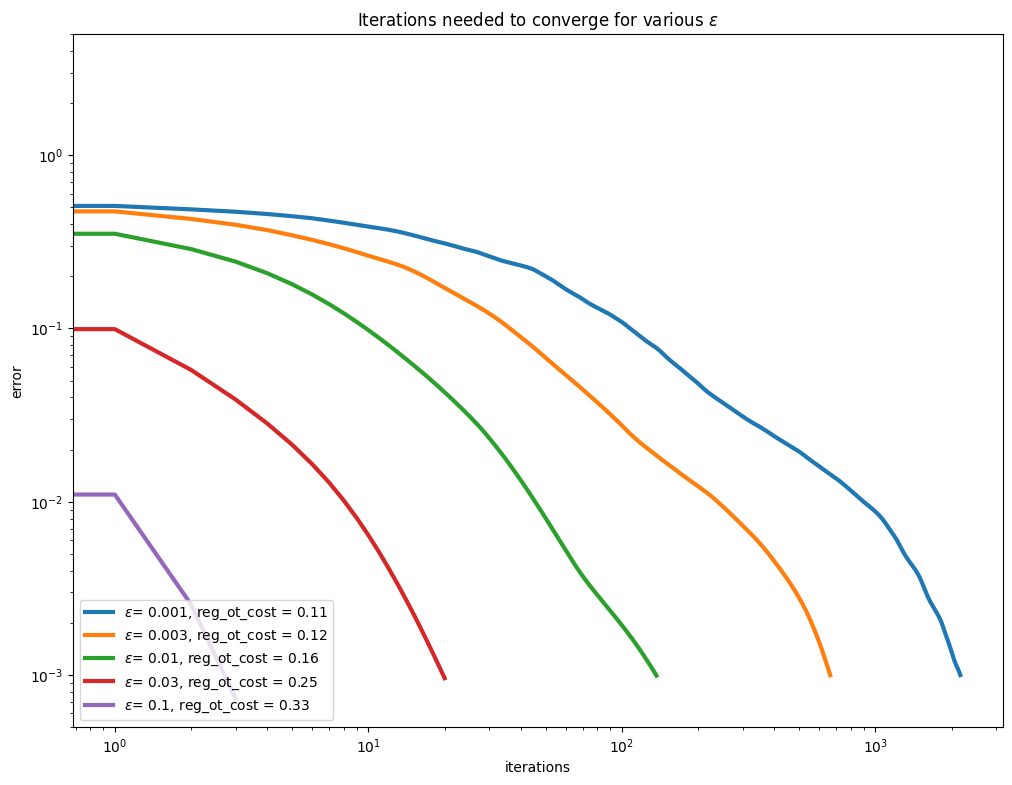
We now take a closer look at the actual convergence curves of the error of the Sinkhorn algorithm (i.e. marginal error). We introduce a plot_results function to visualize this convergence.
def plot_results(
out, leg, loc="lower left", title="", xlabel="", ylabel="", ylim=(0.0005, 5)
):
plt.figure(figsize=(12, 9))
for out_ in out:
plt.plot(out_.errors[out_.errors > -1], linewidth=3)
plt.legend(leg, loc=loc)
plt.yscale("log")
plt.xscale("log")
plt.xlabel(xlabel)
plt.ylabel(ylabel)
plt.title(title)
plt.ylim(*ylim)
plt.show()
We can now look more closely into epsilon’s impact. Obviously, the convergence is slower with smaller regularization: there is a trade-off between speed and how close to the original LP solution we want to be. In the absence of a strong opinion on how small regularization should, we advise that you start using larger epsilon, since this makes your life substantially easier!
plot_results(
out_eps,
leg_eps,
title=r"Iterations needed to converge for various $\varepsilon$",
xlabel="iterations",
ylabel="error",
)
Speeding up Sinkhorn#
Fixed momentum#
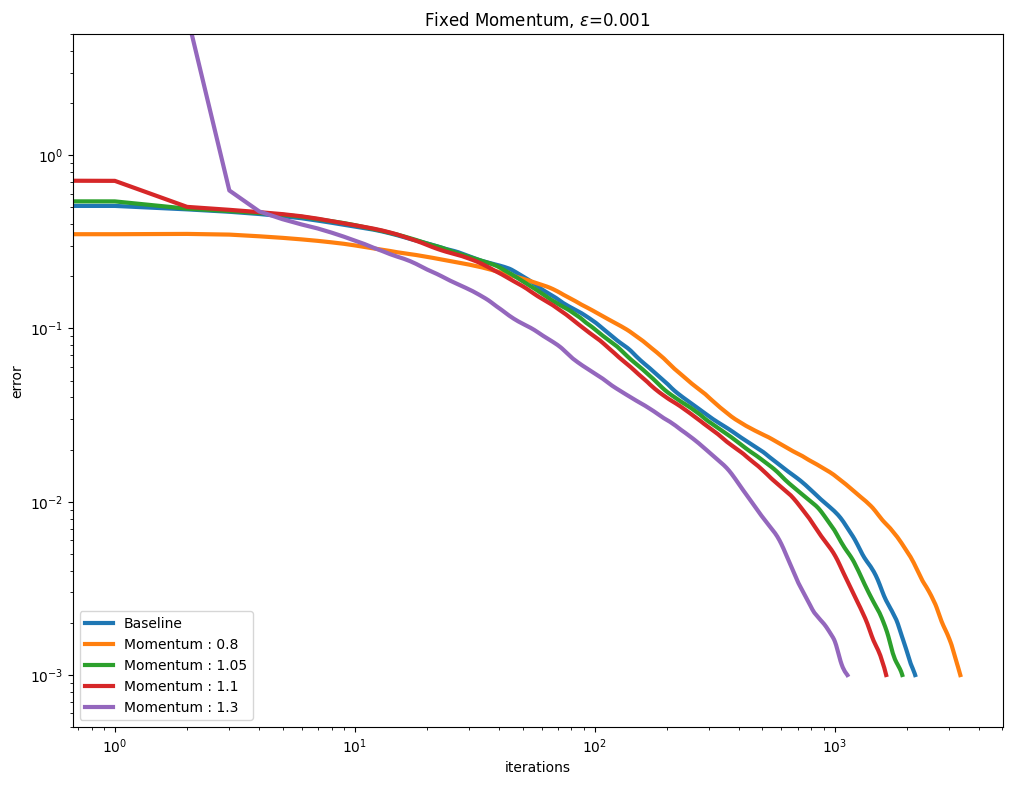
[Thibault et al., 2021] proposed to use a Momentum term to (hopefully) accelerate the convergence of the Sinkhorn algorithm. This is controlled by the momentum parameter when calling Sinkhorn. We vary that parameter along with various epsilon regularization strengths. As can be seen below, a momentum parameter larger than 1.0 (also known as extrapolation or over-relaxation) helps, but can also be more unstable.
We first compute baseline curves for three \(\varepsilon\) values:
epsilons = [1e-4, 1e-3, 1e-2]
out_baseline, leg_baseline = [], []
for epsilon in epsilons:
out_baseline.append(
my_sinkhorn(geometry.Geometry(cost, epsilon=epsilon), a, b)
)
leg_baseline.append("Baseline")
Test now using momentum values lower and larger than 1. Run computations first
out_mom, leg_mom = [], []
for i, epsilon in enumerate(epsilons):
out_mom.append([out_baseline[i]]) # initialize with baseline
leg_mom.append([leg_baseline[i]]) # initialize with baseline
for mom in [0.8, 1.05, 1.1, 1.3]:
out_mom[i].append(
my_sinkhorn(
geometry.Geometry(cost, epsilon=epsilon),
a,
b,
momentum=acceleration.Momentum(value=mom),
)
)
leg_mom[i].append(f"Momentum : {mom}")
Plot them next.
for i, epsilon in enumerate(epsilons):
plot_results(
out_mom[i],
leg_mom[i],
title=r"Fixed Momentum, $\varepsilon$=" + str(epsilon),
xlabel="iterations",
ylabel="error",
)
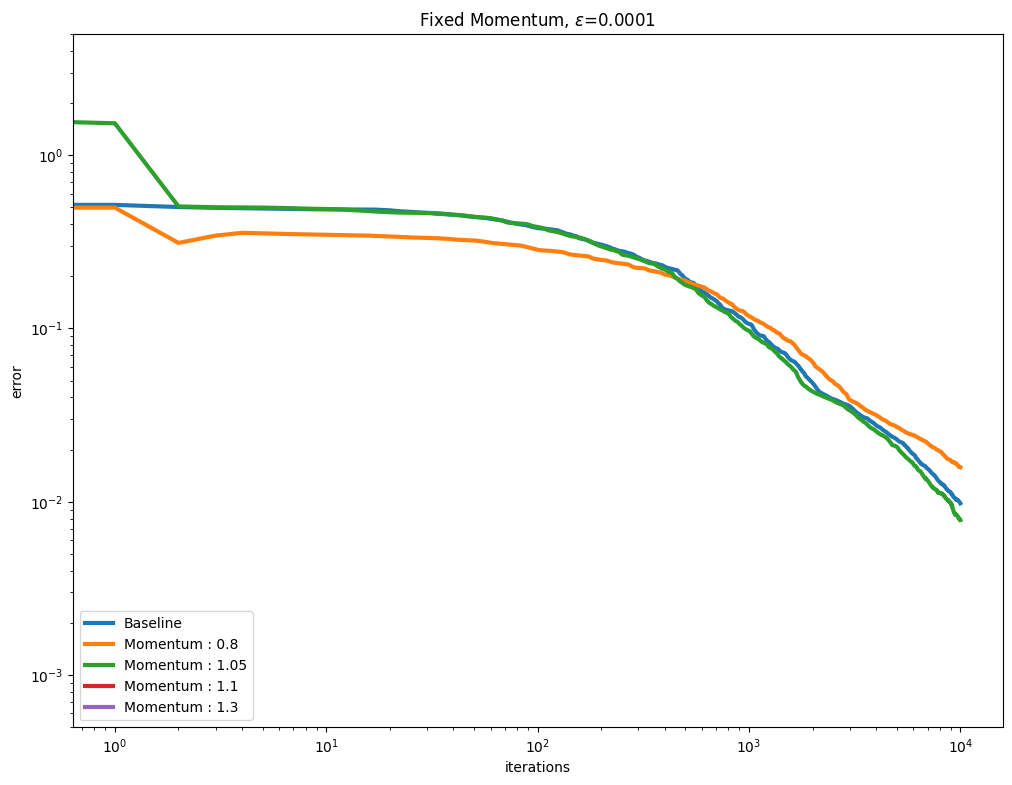
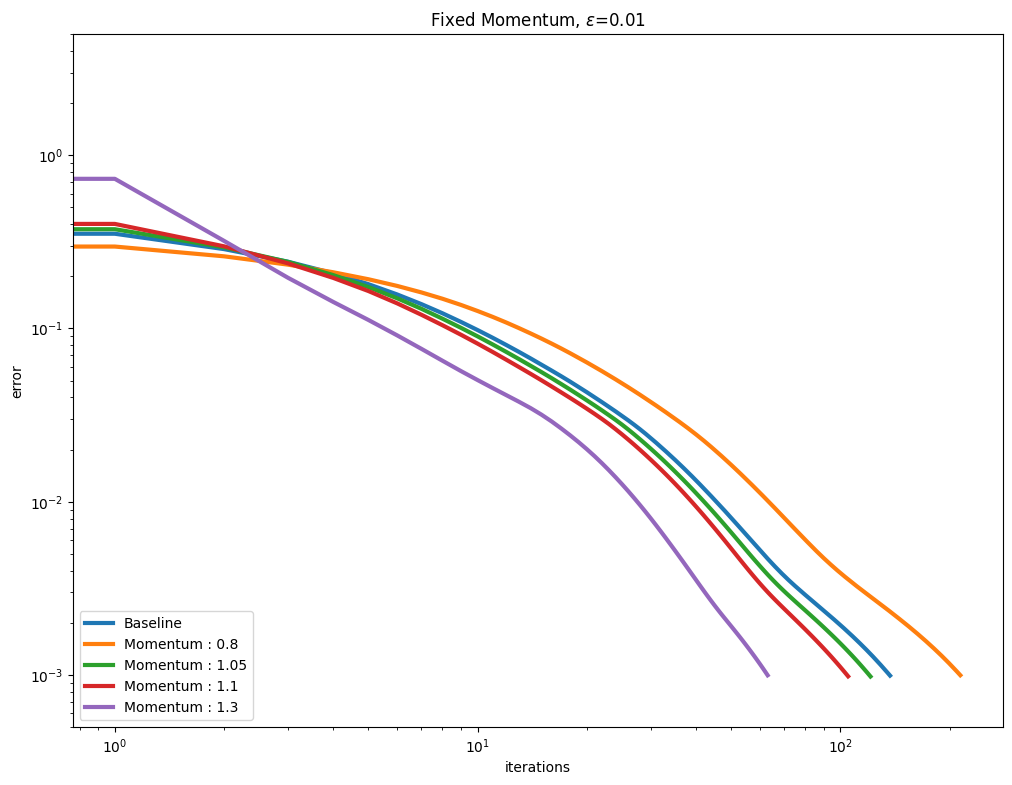
You might have noticed in the first set of curves that the values for momentum \(1.1\) and \(1.3\) are not displayed. For that small \(\varepsilon=0.0001\), the error has diverged from the first update.
[out_mom[0][3].errors], [
out_mom[0][4].errors
] # Computation diverges from first iteration for small epsilon, high momentum.
([Array([inf, -1., -1., ..., -1., -1., -1.], dtype=float32)],
[Array([inf, -1., -1., ..., -1., -1., -1.], dtype=float32)])
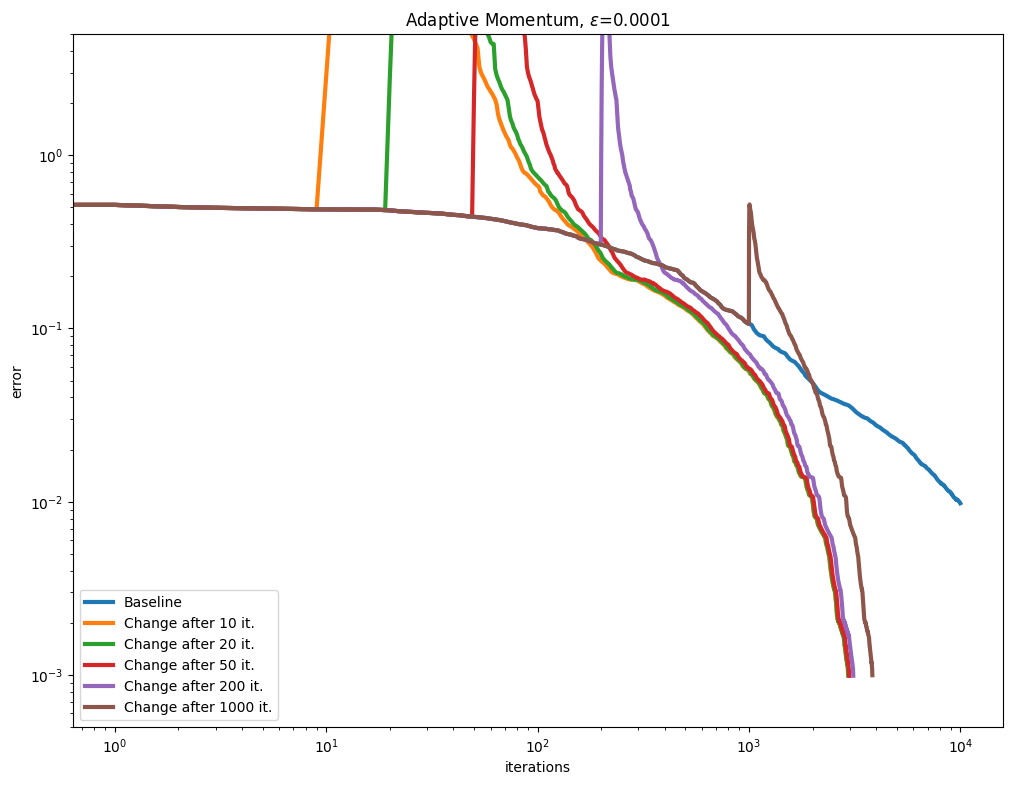
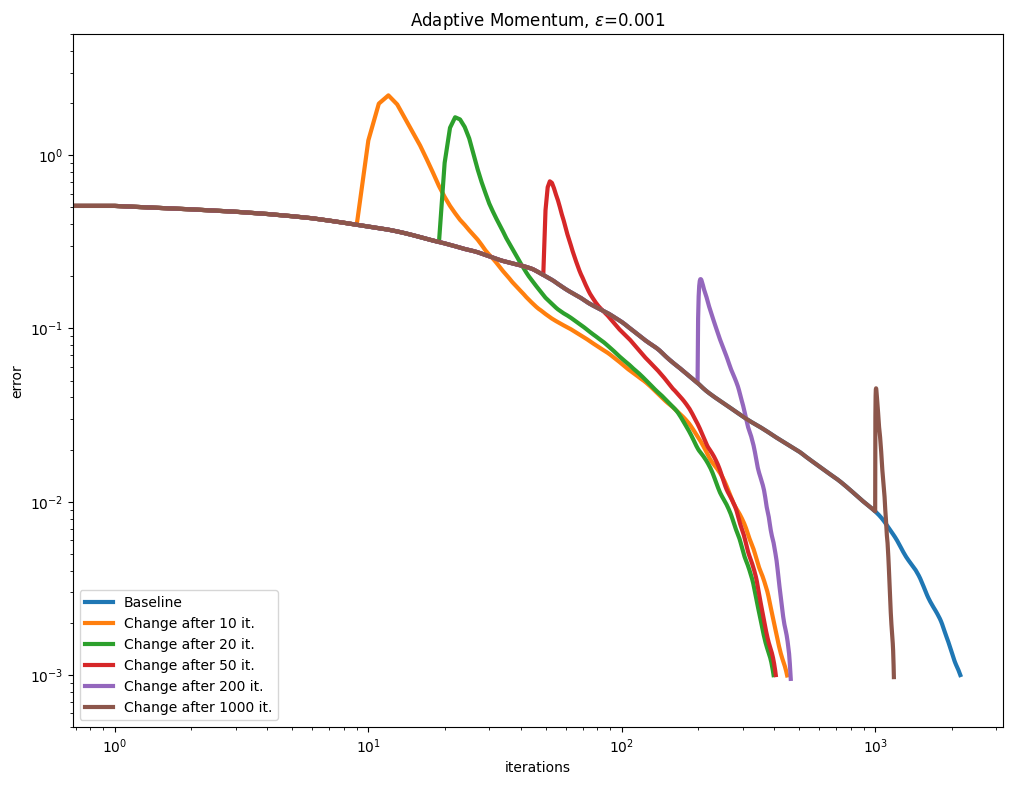
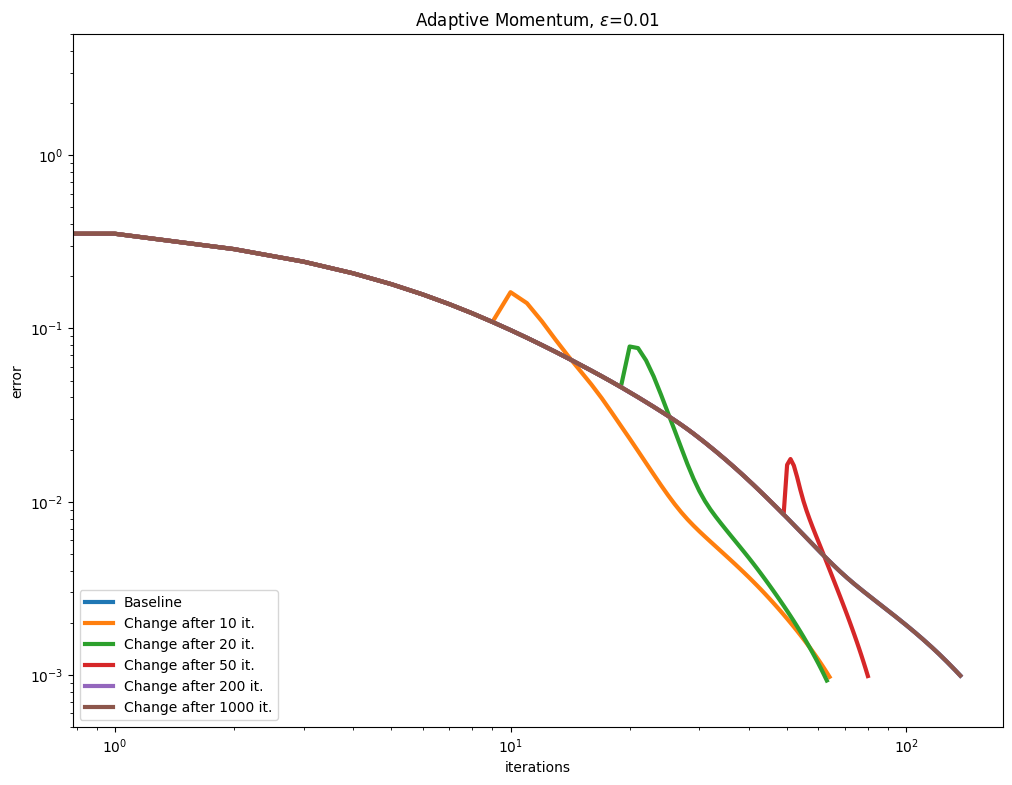
Adaptive momentum#
[Lehmann et al., 2021] propose a simple rule to update the Momentum term adaptively, after a few Sinkhorn iterations, by tracking the convergence of the algorithm to compute a momentum parameter. We test this approach with various epsilon values.
out_chg_mom, leg_chg_mom = [], []
for i, epsilon in enumerate(epsilons):
out_chg_mom.append([out_baseline[i]])
leg_chg_mom.append([leg_baseline[i]])
for chg_momentum_from in [10, 20, 50, 200, 1000]:
out_chg_mom[i].append(
my_sinkhorn(
geometry.Geometry(cost, epsilon=epsilon),
a,
b,
momentum=acceleration.Momentum(start=chg_momentum_from),
)
)
leg_chg_mom[i].append(f"Change after {chg_momentum_from} it.")
As can be seen in the curves below, this seems to be a very effective and robust way to speed up the algorithm.
for i, epsilon in enumerate(epsilons):
plot_results(
out_chg_mom[i],
leg_chg_mom[i],
title=r"Adaptive Momentum, $\varepsilon$=" + str(epsilon),
xlabel="iterations",
ylabel="error",
)
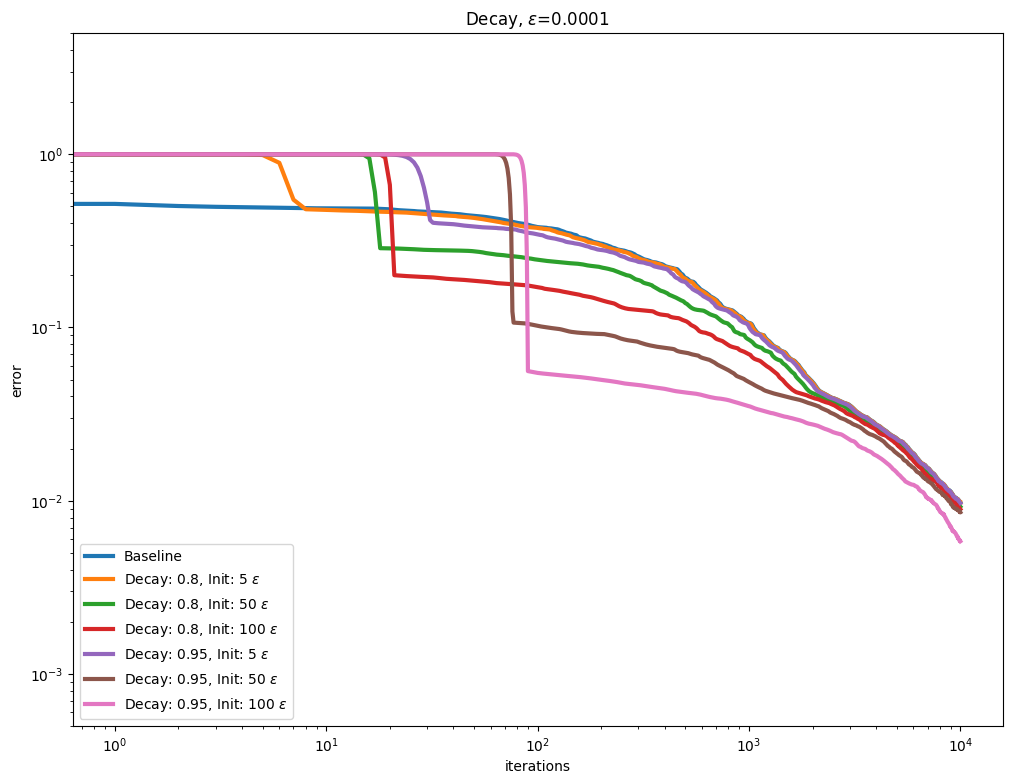
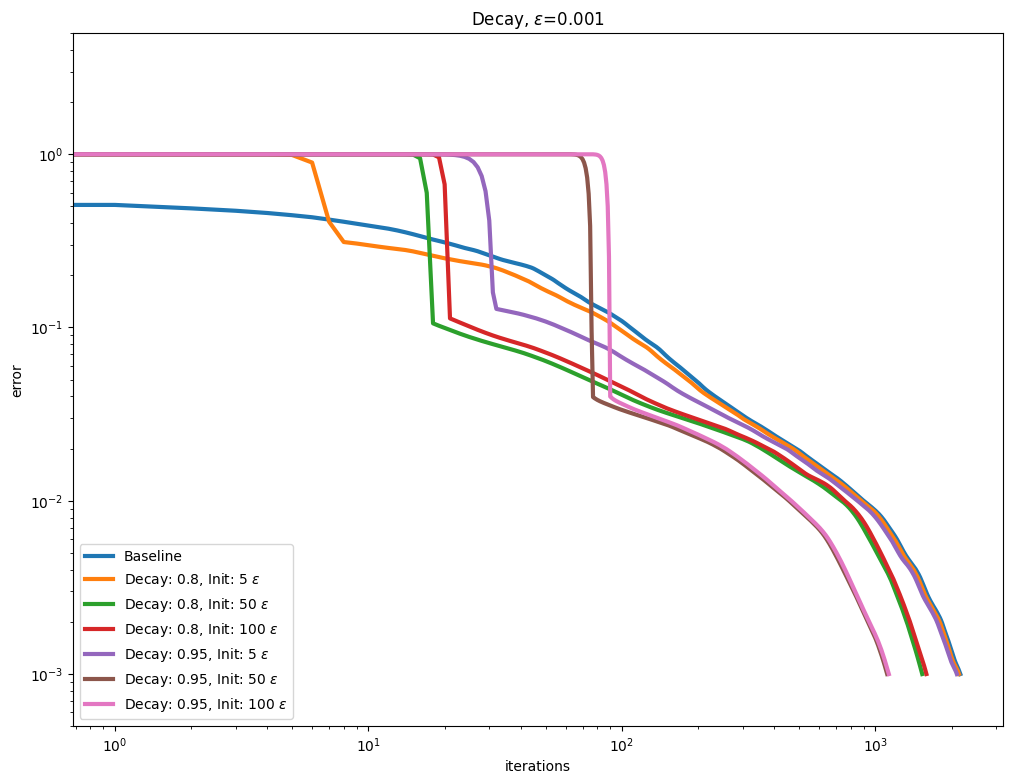
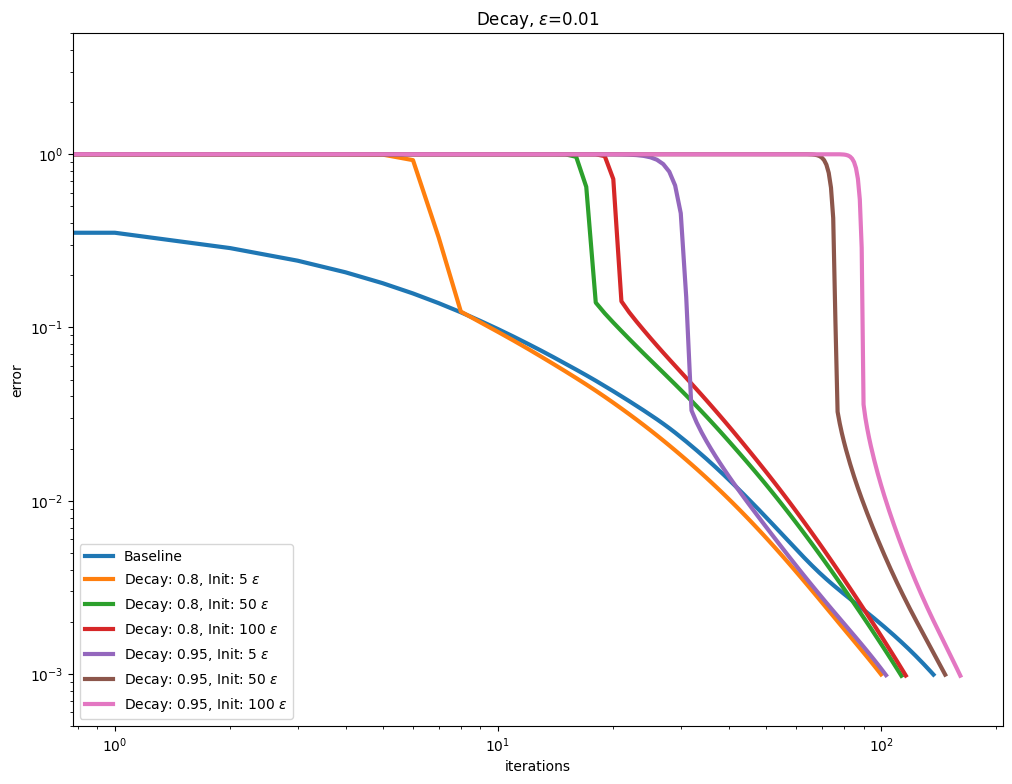
\(\varepsilon\) decay#
It also possible to use so called Epsilon decay, which consists in starting the Sinkhorn iterations with a large \(\varepsilon\) value that is progressively decreased using a multiplicative update.
out_scaling, leg_scaling = [], []
for i, epsilon in enumerate(epsilons):
out_scaling.append([out_baseline[i]])
leg_scaling.append([leg_baseline[i]])
for decay in [0.8, 0.95]:
for init in [5, 50, 100]:
Epsilon = geometry.epsilon_scheduler.Epsilon(
target=epsilon, init=init, decay=decay
)
out_scaling[i].append(
my_sinkhorn(
geometry.Geometry(cost, epsilon=Epsilon),
a,
b,
)
)
leg_scaling[i].append(
rf"Decay: {decay}, Init: {init} $\varepsilon$"
)
for i, epsilon in enumerate(epsilons):
plot_results(
out_scaling[i],
leg_scaling[i],
title=rf"Decay, $\varepsilon$=" + str(epsilon),
xlabel="iterations",
ylabel="error",
)
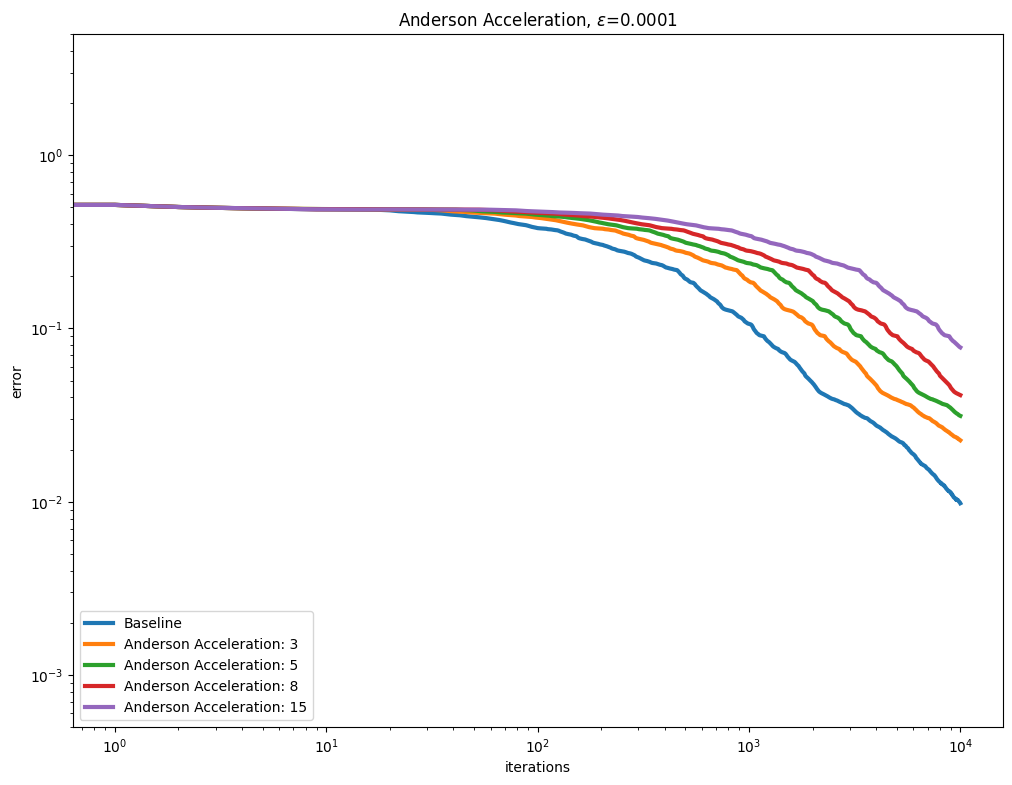
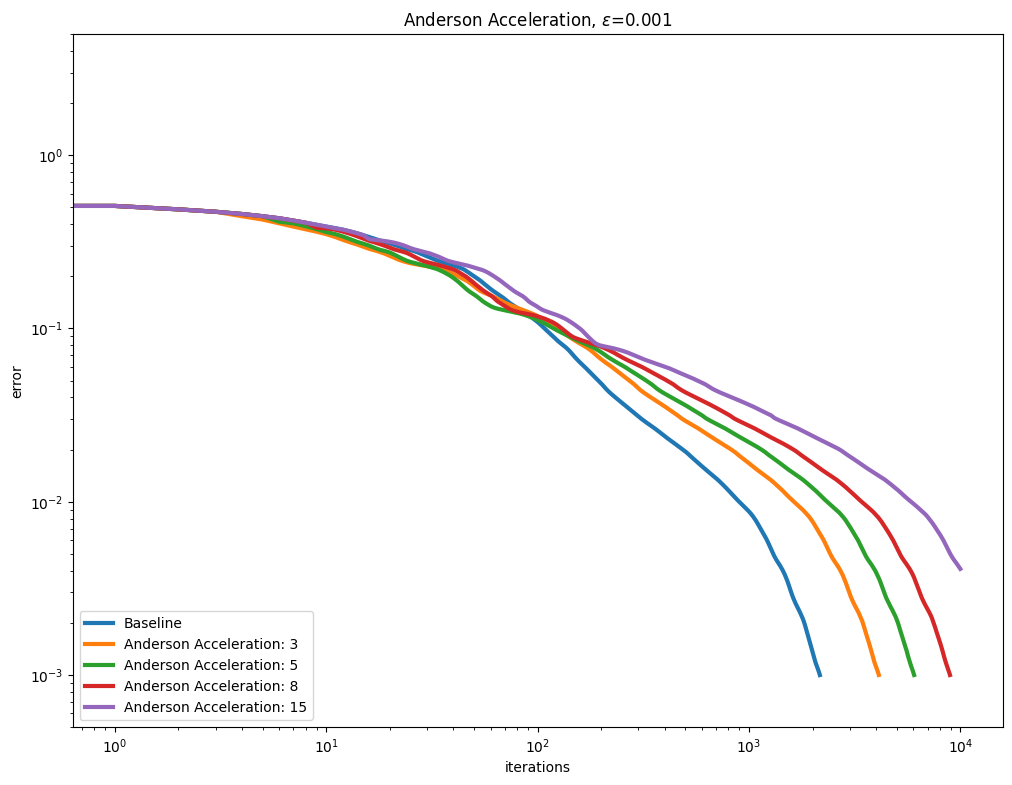
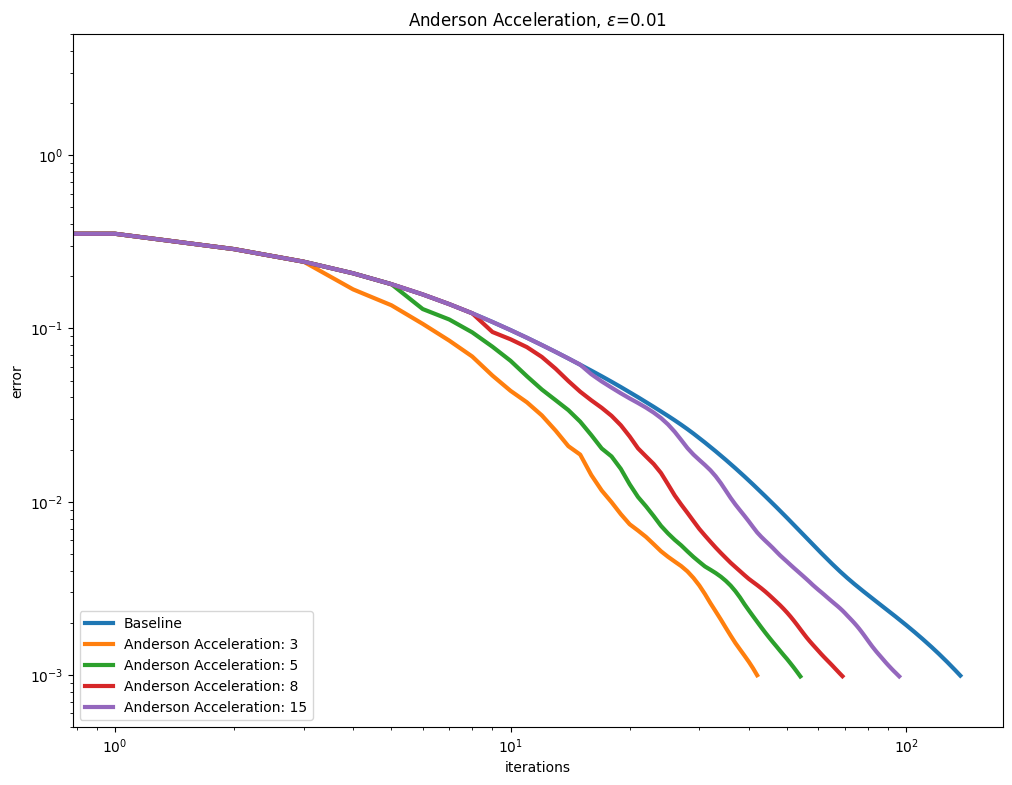
Anderson acceleration#
Using AndersonAcceleration on the Sinkhorn algorithm provides mixed results, worsening performance for smaller epsilon regularization, and slightly improving it as the regularization gets larger.
out_anderson, leg_anderson = [], []
for i, epsilon in enumerate(epsilons):
out_anderson.append([out_baseline[i]])
leg_anderson.append([leg_baseline[i]])
for memory in [3, 5, 8, 15]:
out_anderson[i].append(
my_sinkhorn(
geometry.Geometry(cost, epsilon=epsilon),
a,
b,
anderson=acceleration.AndersonAcceleration(memory=memory),
)
)
leg_anderson[i].append(f"Anderson Acceleration: {memory}")
for i, epsilon in enumerate(epsilons):
plot_results(
out_anderson[i],
leg_anderson[i],
title=r"Anderson Acceleration, $\varepsilon$=" + str(epsilon),
xlabel="iterations",
ylabel="error",
)
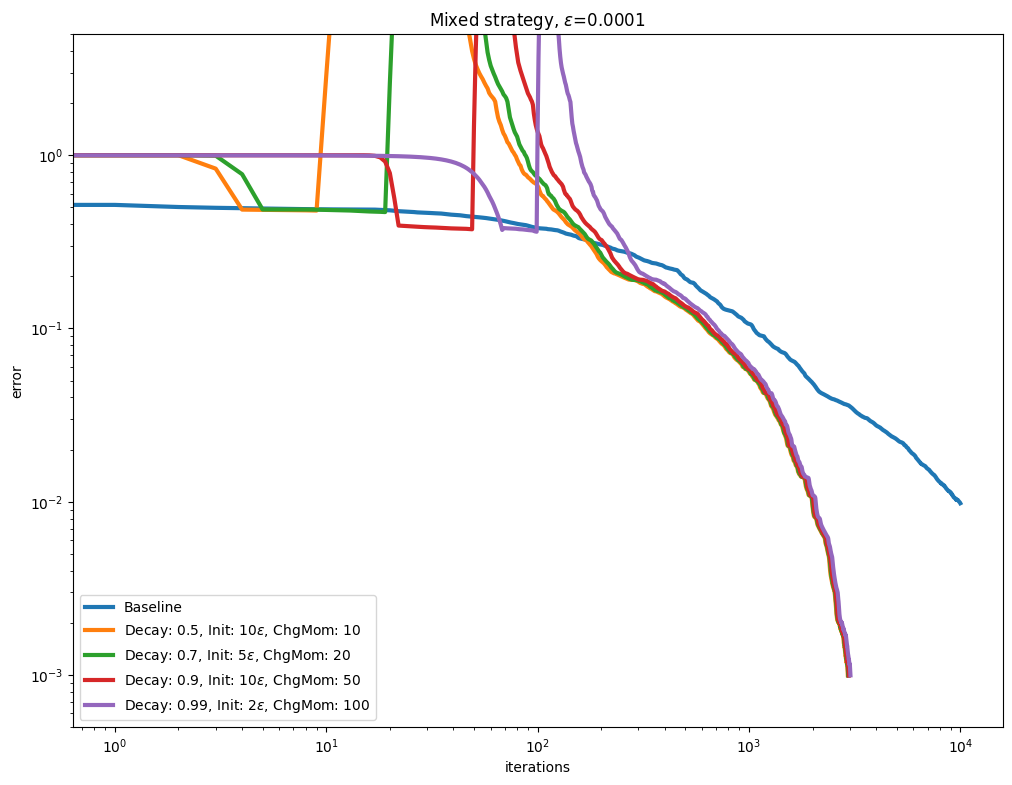
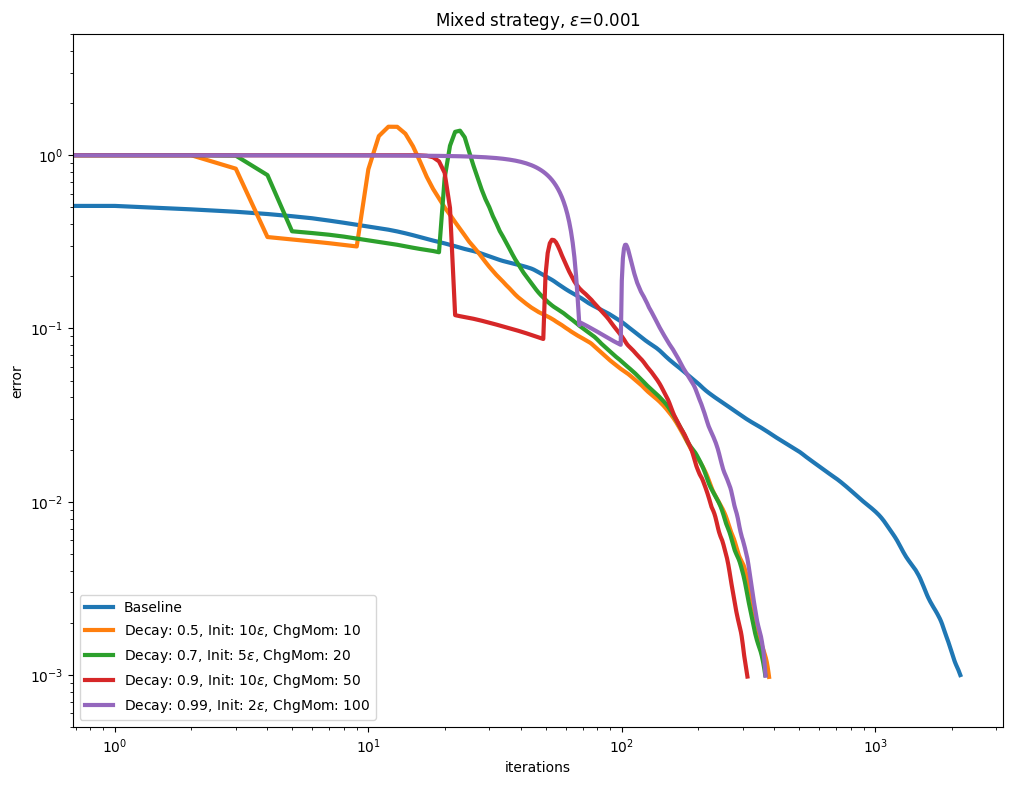
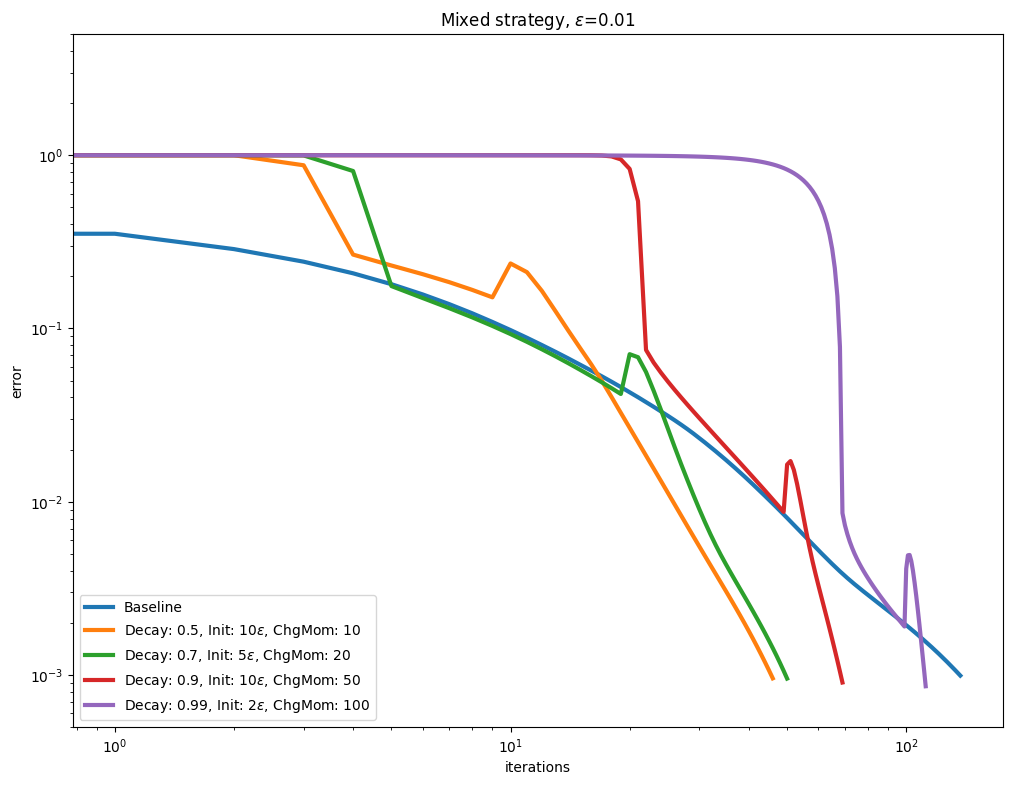
Decay and momentum#
An interesting direction to accelerate convergence is to update the Momentum after the Epsilon decay schedule has converged.
out_mixed, leg_mixed = [], []
for i, epsilon in enumerate(epsilons):
out_mixed.append([out_baseline[i]])
leg_mixed.append([leg_baseline[i]])
for decay, init, chg_momentum_from in [
[0.5, 10, 10],
[0.7, 5, 20],
[0.9, 10, 50],
[0.99, 2, 100],
]:
Epsilon = geometry.epsilon_scheduler.Epsilon(
target=epsilon, init=init, decay=decay
)
out_mixed[i].append(
my_sinkhorn(
geometry.Geometry(cost, epsilon=Epsilon),
a,
b,
momentum=acceleration.Momentum(start=chg_momentum_from),
)
)
leg_mixed[i].append(
rf"Decay: {decay}, Init: {init}$\varepsilon$, ChgMom: {chg_momentum_from}"
)
for i, epsilon in enumerate(epsilons):
plot_results(
out_mixed[i],
leg_mixed[i],
title=rf"Mixed strategy, $\varepsilon$=" + str(epsilon),
xlabel="iterations",
ylabel="error",
)