
Monge gap#
import sys
if "google.colab" in sys.modules:
%pip install -q git+https://github.com/ott-jax/ott@main
import dataclasses
from types import MappingProxyType
from typing import Any, Dict, Iterator, Literal, Mapping, Optional, Tuple, Union
import jax
import jax.numpy as jnp
import sklearn.datasets
import optax
from flax import linen as nn
from matplotlib import pyplot as plt
from ott import datasets
from ott.geometry import costs, pointcloud
from ott.neural.methods import monge_gap
from ott.neural.networks import potentials
from ott.solvers.linear import acceleration
from ott.tools import sinkhorn_divergence
The Monge gap: a regularizer to promote “OT-like” maps#
We seek to learn an optimal transport (Monge) map \(T^\star\) between two probability measures \(\mu, \nu\) in \(\mathbb{R}^d\), w.r.t. a cost function \(c : \mathbb{R}^d \times \mathbb{R}^d \rightarrow \mathbb{R}\), namely:
We show how to use the monge_gap(), a regularizer proposed by [Uscidda and Cuturi, 2023] to do so. Computing an OT map can be split into two goals: move mass efficiently from \(\mu\) to \(T\sharp\mu\) (this is the objective), while, at the same time, making sure \(T\sharp\mu\) “lands” on \(\nu\) (the constraint).
The first requirement (efficiency) can be quantified with the Monge gap \(\mathcal{M}_\mu^c\), a non-negative regularizer defined through \(\mu\) and \(c\), and which takes as an argument any map \(T : \mathbb{R}^d \rightarrow \mathbb{R}^d\). The value \(\mathcal{M}_\mu^c(T)\) quantifies how \(T\) moves mass efficiently between \(\mu\) and \(T \sharp \mu\), and only cancels \(\mathcal{M}_\mu^c(T) = 0\) i.f.f. \(T\) is optimal between \(\mu\) and \(T \sharp \mu\) for the cost \(c\).
The second requirement (landing on \(\nu\)) is then simply handled using a fitting loss \(\Delta\) between \(T \sharp \mu\) and \(\nu\). This can be measured, e.g., using a sinkhorn_divergence(). Introducing a regularization strength \(\lambda_\mathrm{MG} > 0\), looking for a Monge map can be reformulated as finding a \(T\) that minimizes:
We parameterize maps \(T\) as neural networks \(\{T_\theta\}_{\theta \in \mathbb{R}^d}\), using the MongeGapEstimator solver. For the squared Euclidean cost, this method provides a simple alternative to the W2NeuralDual solver, but one that does not require parameterizing networks as gradients of convex functions.
Data Generation#
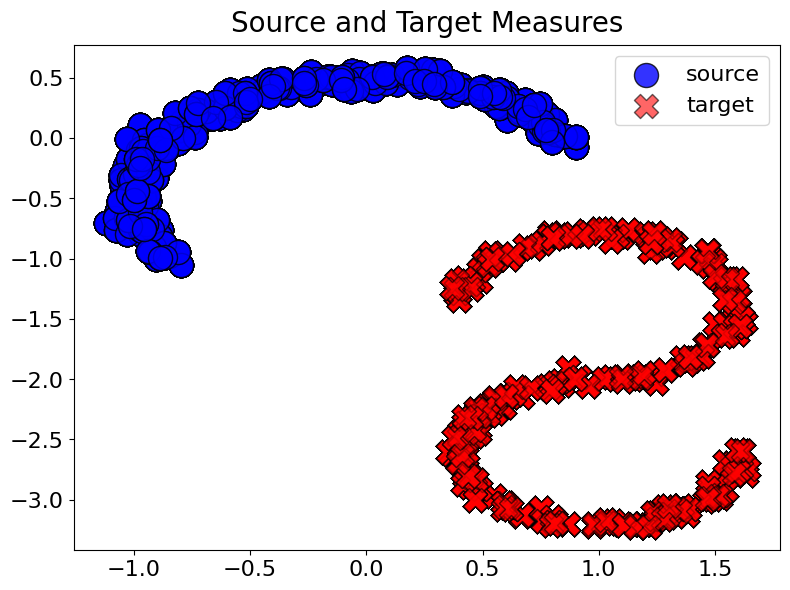
We generate some simple datasets for this notebook.
@dataclasses.dataclass
class SklearnDistribution:
"""A class to define toy probability 2-dimensional distributions.
Produces rotated ``moons`` and ``s_curve`` sklearn datasets, using
``theta_rotation``.
"""
name: Literal["moon", "s_curve"]
theta_rotation: float = 0.0
mean: Optional[jnp.ndarray] = None
noise: float = 0.01
scale: float = 1.0
batch_size: int = 1024
rng: Optional[jax.Array] = None
def __iter__(self) -> Iterator[jnp.ndarray]:
"""Random sample generator from Gaussian mixture.
Returns:
A generator of samples from the Gaussian mixture.
"""
return self._create_sample_generators()
def _create_sample_generators(self) -> Iterator[jnp.ndarray]:
rng = jax.random.PRNGKey(0) if self.rng is None else self.rng
# define rotation matrix tp rotate samples
rotation = jnp.array(
[
[jnp.cos(self.theta_rotation), -jnp.sin(self.theta_rotation)],
[jnp.sin(self.theta_rotation), jnp.cos(self.theta_rotation)],
]
)
while True:
rng, _ = jax.random.split(rng)
seed = jax.random.randint(rng, [], minval=0, maxval=1e5).item()
if self.name == "moon":
samples, _ = sklearn.datasets.make_moons(
n_samples=(self.batch_size, 0),
random_state=seed,
noise=self.noise,
)
elif self.name == "s_curve":
x, _ = sklearn.datasets.make_s_curve(
n_samples=self.batch_size,
random_state=seed,
noise=self.noise,
)
samples = x[:, [2, 0]]
else:
raise NotImplementedError(
f"SklearnDistribution `{self.name}` not implemented."
)
samples = jnp.asarray(samples, dtype=jnp.float32)
samples = jnp.squeeze(jnp.matmul(rotation[None, :], samples.T).T)
mean = jnp.zeros(2) if self.mean is None else self.mean
samples = mean + self.scale * samples
yield samples
def create_samplers(
source_kwargs: Mapping[str, Any] = MappingProxyType({}),
target_kwargs: Mapping[str, Any] = MappingProxyType({}),
train_batch_size: int = 256,
valid_batch_size: int = 256,
rng: Optional[jax.Array] = None,
) -> Tuple[datasets.Dataset, datasets.Dataset, int]:
"""Samplers from ``SklearnDistribution``."""
rng = jax.random.PRNGKey(0) if rng is None else rng
rng1, rng2, rng3, rng4 = jax.random.split(rng, 4)
train_dataset = datasets.Dataset(
source_iter=iter(
SklearnDistribution(
rng=rng1, batch_size=train_batch_size, **source_kwargs
)
),
target_iter=iter(
SklearnDistribution(
rng=rng2, batch_size=train_batch_size, **target_kwargs
)
),
)
valid_dataset = datasets.Dataset(
source_iter=iter(
SklearnDistribution(
rng=rng3, batch_size=valid_batch_size, **source_kwargs
)
),
target_iter=iter(
SklearnDistribution(
rng=rng4, batch_size=valid_batch_size, **target_kwargs
)
),
)
dim_data = 2
return train_dataset, valid_dataset, dim_data
We also define a plot function to display results
def plot_samples(
batch: Dict[str, Any],
num_points: Optional[int] = None,
title: Optional[str] = None,
figsize: Tuple[int, int] = (8, 6),
rng: Optional[jax.Array] = None,
):
"""Plot samples from the source and target measures.
If source samples mapped by the fitted map are provided in ``batch``,
the function plots these predictions as well.
"""
rng = jax.random.PRNGKey(0) if rng is None else rng
fig, ax = plt.subplots(figsize=figsize)
if num_points is None:
subsample = jnp.arange(len(batch["source"]))
else:
subsample = jax.random.choice(
rng, a=len(batch["source"]), shape=(num_points,)
)
ax.scatter(
batch["source"][subsample, 0],
batch["source"][subsample, 1],
label="source",
c="b",
edgecolors="k",
s=300,
alpha=0.8,
)
ax.scatter(
batch["target"][subsample, 0],
batch["target"][subsample, 1],
label="target",
c="r",
edgecolors="k",
marker="X",
s=300,
alpha=0.6,
)
bool_plot_pred = "mapped_source" in batch
if "mapped_source" in batch:
ax.scatter(
batch["mapped_source"][subsample, 0],
batch["mapped_source"][subsample, 1],
label="push-forward",
c="orange",
edgecolors="k",
marker="X",
s=300,
alpha=0.8,
)
z = batch["mapped_source"] - batch["source"]
ax.quiver(
batch["source"][subsample, 0],
batch["source"][subsample, 1],
z[subsample, 0],
z[subsample, 1],
angles="xy",
scale_units="xy",
scale=1.0,
width=0.003,
headwidth=10,
headlength=10,
color="dodgerblue",
edgecolor="k",
alpha=0.5,
)
if title is None:
title = (
r"Fitted map $\hat{T}_\theta$"
if bool_plot_pred
else r"Source and Target Measures"
)
ax.set_title(title, fontsize=20, y=1.01)
ax.tick_params(axis="both", which="major", labelsize=16)
ax.legend(fontsize=16)
fig.tight_layout()
plt.show()
We can now use these tools to create the task
train_dataset, valid_dataset, dim_data = create_samplers(
source_kwargs={
"name": "moon",
"theta_rotation": jnp.pi / 6,
"mean": jnp.array([0.0, -0.5]),
"noise": 0.05,
},
target_kwargs={
"name": "s_curve",
"scale": 0.6,
"mean": jnp.array([1.0, -2.0]),
"theta_rotation": jnp.pi / 2,
"noise": 0.05,
},
)
batch = {}
batch["source"] = next(train_dataset.source_iter)
batch["target"] = next(train_dataset.target_iter)
plot_samples(batch=batch, num_points=10000)
Learning Maps: Losses, Hyperparameters and Training Loop#
The fit_map function below implements the following minimization:
For all fittings, we use \(\Delta = S_{\varepsilon, \ell_2^2}\), the sinkhorn_divergence() with the squared Euclidean cost
The function considers a ground cost function cost_fn (corresponding to \(c\)), as well as the epsilon regularization parameters to compute approximated Wasserstein distances, both for fitting and regularizer.
def fit_map(
cost_fn,
relative_epsilon_fitting=1e-1,
relative_epsilon_regularizer=1e-2,
regularizer_strength=1.0,
num_train_iters=5000,
):
dim_data = 2
# define the neural map
model = potentials.PotentialMLP(
dim_hidden=[32, 64, 32], is_potential=False, act_fn=nn.gelu
)
# define the optimizer to learn the neural map
lr = 1e-3
optimizer = optax.adam(learning_rate=lr)
# Compute an order of magnitude for epsilon fitting
y = next(train_dataset.target_iter)
epsilon_fitting_scale = pointcloud.PointCloud(y).mean_cost_matrix
epsilon_fitting = relative_epsilon_fitting * epsilon_fitting_scale
print("Selected `epsilon_fitting`:", epsilon_fitting)
@jax.jit
def fitting_loss(x, y):
out = sinkhorn_divergence.sinkhorn_divergence(
pointcloud.PointCloud, x, y, epsilon=epsilon_fitting, static_b=True
)
return out.divergence, out.n_iters
if cost_fn is None:
regularizer = None
else:
# Compute an order of magnitude for epsilon regularizer
x = next(train_dataset.source_iter)
epsilon_regularizer_scale = pointcloud.PointCloud(x, y).mean_cost_matrix
epsilon_regularizer = (
relative_epsilon_regularizer * epsilon_regularizer_scale
)
print("Selected `epsilon_regularizer`:", epsilon_regularizer)
def regularizer(x, y):
gap, out = monge_gap.monge_gap_from_samples(
x,
y,
cost_fn=cost_fn,
epsilon=epsilon_regularizer,
return_output=True,
)
return gap, out.n_iters
# define solver
solver = monge_gap.MongeGapEstimator(
dim_data=dim_data,
fitting_loss=fitting_loss,
regularizer=regularizer,
model=model,
optimizer=optimizer,
regularizer_strength=regularizer_strength,
num_train_iters=num_train_iters,
logging=True,
valid_freq=25,
)
return solver.train_map_estimator(
trainloader_source=train_dataset.source_iter,
trainloader_target=train_dataset.target_iter,
validloader_source=valid_dataset.source_iter,
validloader_target=valid_dataset.target_iter,
)
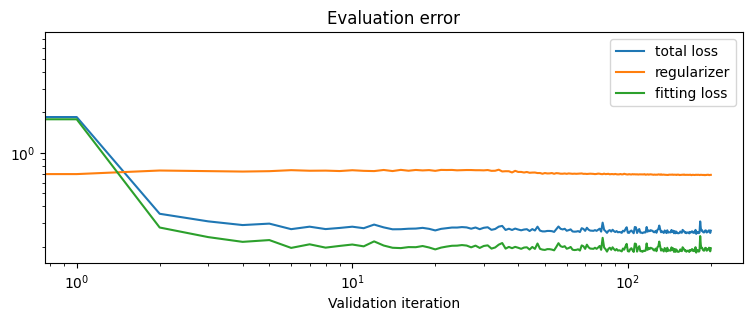
def plot_fit_map(title_prefix, neural_state, logs, num_points=30):
plt.figure(figsize=(9, 3))
plt.plot(logs["eval"]["total_loss"], label="total loss")
reg = logs["eval"].get("regularizer")
if reg[0] > 0.0:
plt.plot(reg, label="regularizer")
plt.plot(logs["eval"].get("fitting_loss"), label="fitting loss")
plt.title("Evaluation error")
plt.xlabel("Validation iteration")
plt.legend()
plt.loglog()
# plot the fitted map
batch["mapped_source"] = neural_state.apply_fn(
{"params": neural_state.params},
batch["source"][:, :num_points],
)
plot_samples(
batch=batch,
num_points=num_points,
title=r"Fitted map $\hat{T}_\theta$, " + title_prefix,
)
sink_its = logs["eval"]["log_fitting"]
print(
"Avg # of Sinkhorn iterations for fitting loss",
10
* jnp.mean(jnp.array([sink_its[i][0] for i in range(len(sink_its))])),
)
if reg[0] > 0.0:
sink_its = logs["eval"]["log_regularizer"]
print(
"Avg # of Sinkhorn iterations for regularizer",
10
* jnp.mean(jnp.array([sink_its[i] for i in range(len(sink_its))])),
)
Experiments#
We can now examine how these maps vary, depending on whether the Monge gap was used or not.
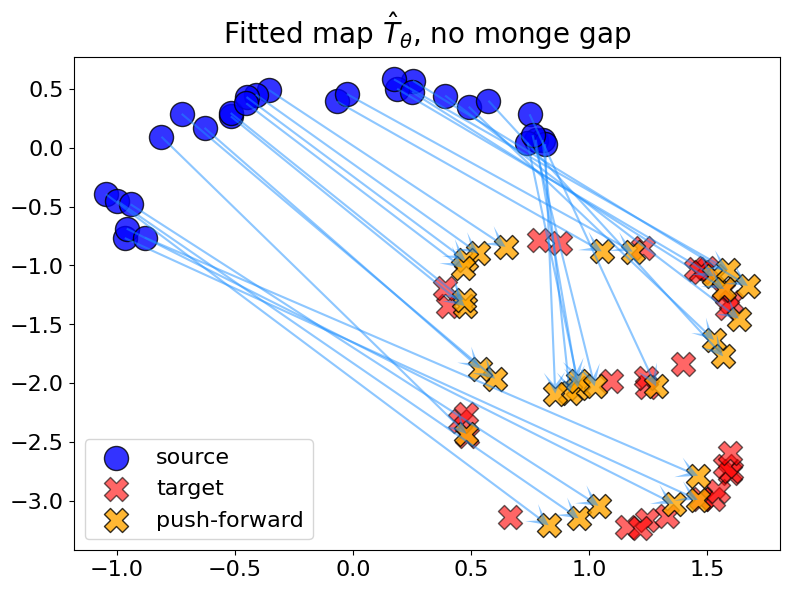
No Monge Gap#
When fitting without a Monge gap, one recovers an arbitrary push-forward, which has no reason to be optimal for any cost.
out_nn, logs = fit_map(None)
Selected `epsilon_fitting`: 0.17911474
100%|██████████| 5000/5000 [00:54<00:00, 92.53it/s, fitting_loss: 0.1896, regularizer: NA ,total: 0.1896]
plot_fit_map("no monge gap", out_nn, logs)
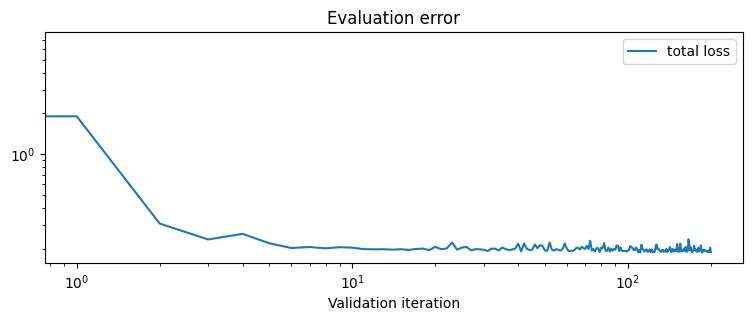
Avg # of Sinkhorn iterations for fitting loss 563.1841
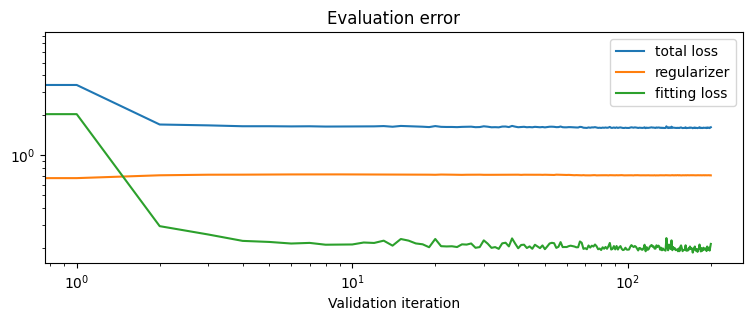
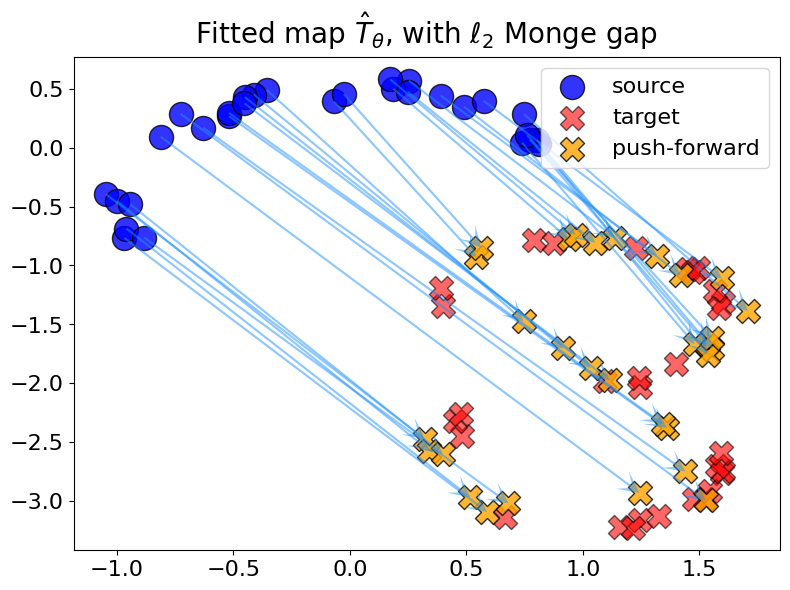
Monge gap with \(c = \ell_2\)#
For the Monge gap with \(c = \ell_2\), we obtain a “needle” alignment (without crossing lines) because \(c\) is a distance: this is known as the Monge Mather shortening principle (see e.g. [Villani, 2009]).
out_nn_l2, logs_l2 = fit_map(costs.Euclidean(), regularizer_strength=2.0)
Selected `epsilon_fitting`: 0.17044178
Selected `epsilon_regularizer`: 0.06964297
100%|██████████| 5000/5000 [00:59<00:00, 83.46it/s, fitting_loss: 0.2151, regularizer: 0.7066 ,total: 1.6283]
plot_fit_map(rf"with $\ell_2$ Monge gap", out_nn_l2, logs_l2)
Avg # of Sinkhorn iterations for fitting loss 565.67163
Avg # of Sinkhorn iterations for regularizer 200.99503
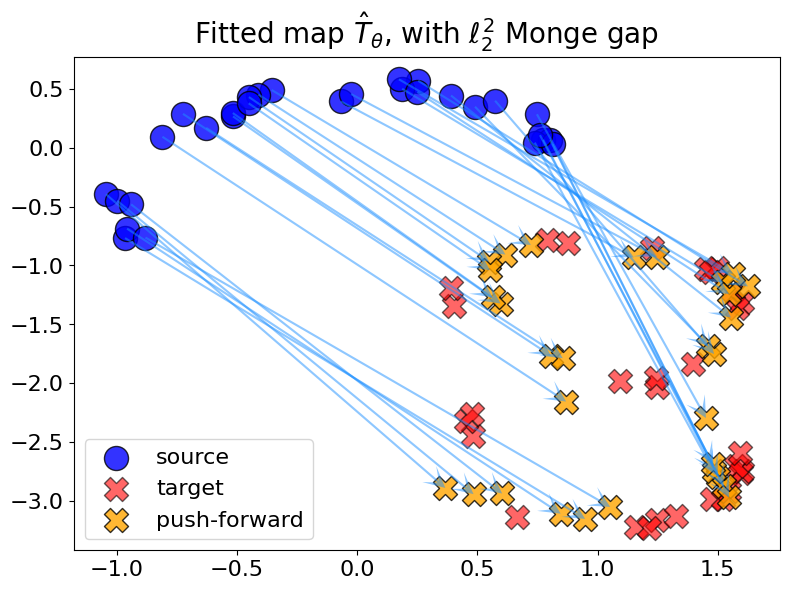
Monge gap with \(c = \ell_2^2\)#
For \(c = \ell_2^2\), we observe crossings when the sum of the squared diagonals of the quadrilateral induced by 4 points \((x_1, x_2, T(x_1), T(x_2))\) is lower than the sum of the squared sides.
out_nn_l22, logs_l22 = fit_map(costs.SqEuclidean(), regularizer_strength=0.1)
Selected `epsilon_fitting`: 0.16706443
Selected `epsilon_regularizer`: 0.074911
100%|██████████| 5000/5000 [01:23<00:00, 60.16it/s, fitting_loss: 0.1948, regularizer: 0.6860 ,total: 0.2634]
plot_fit_map(rf"with $\ell_2^2$ Monge gap", out_nn_l22, logs_l22)
Avg # of Sinkhorn iterations for fitting loss 546.2687
Avg # of Sinkhorn iterations for regularizer 1223.8805